
Wenn die Robotik-AG (Öffnet in einem neuen Tab) der Fachhochschule Dortmund ihre jährliche Blockwoche ausrichtet, dann wird die interdisziplinäre Zusammenarbeit im Master-Studium ganz besonders praktisch greifbar. Gemeinsame Ideen und Lösungen waren auch im November 2023 wieder gefragt: Studierende der Fachbereiche Elektrotechnik, Informatik, Informationstechnik und Maschinenbau stellten sich einer anspruchsvollen Aufgabe aus der Rettungsrobotik.
Die Aufgabe
In den Räumen des FH-eigenen Instituts zur Digitalisierung von Arbeits- und Lebenswelten (IDiAL (Öffnet in einem neuen Tab) ) erwartet die Teilnehmenden ein Szenario, das sich an einem typischen Einsatz in der Rettungsrobotik orientiert: Ein katastrophales Ereignis erfordert den Einsatz externer Rettungskräfte, zum Beispiel in einem Gebäude, das durch Brände oder durch Erdbeben zerstört ist. Die vorgefundene Einsatzumgebung ist entweder grundsätzlich unbekannt, da keine Daten zum Gebäude abrufbar sind, oder die Umgebung wurde durch die Katastrophe so verändert, dass die vorhandenen Karten nicht mehr nutzbar sind. Der Einsatzort kann dabei für menschliche Einsatzkräfte unzugänglich oder zu gefährlich sein. Dennoch muss sichergestellt werden, dass keine Personen oder Objekte eingeschlossen sind, die es zu bergen gilt.
In solchen Szenarien werden nicht erst seit dem Unglück von Fukushima oder dem Brand von Notre-Dame de Paris Roboter eingesetzt, um die Umgebung zu erkunden und einfache Bergungsaufgaben zu übernehmen. Natürlich ist dem Szenario der Blockwoche weder ein Brand noch ein Tsunami vorausgegangen, auch strahlungsfeste Rettungsroboter sind nicht erforderlich. Vielmehr wird im Roboterlabor des Instituts IDiAL mit Schaumstoffwürfeln und Kartons immer wieder eine neue Umgebung aufgebaut. Drei Teams nutzen sogenannte omnidirektionale EduRobs, in beliebige Richtungen fahrbare Plattformen, um den entsprechenden Teilbereich der Aufgabe zu bearbeiten.
- Das Team Greifer der Fachbereiche Maschinenbau (Lehrende: Alexander Lel und Prof. Dr. Thomas Straßmann) und Elektrotechnik erweitert die EduRobs um einen Greifer, mit dem sich Getränkedosen als zu bergende Objekte aufnehmen und so transportieren lassen. Betreut und unterstützt wird das Team vom Mitarbeiter Maximilian Becker (Elektrotechnik).
- Im Team Navigation des Fachbereichs Informatik (Lehrende: Alexander Miller und Prof. Dr. Christof Röhrig) geht es darum, den EduRob um einen 360°-Laserscanner zu ergänzen, sodass sich automatisch eine Karte erzeugen lässt. Der eingesetzte hochgenaue Sensor erfasst die Arbeitsumgebung, dabei kann er Hindernisse und Wände berücksichtigen. Die so erstellten Karten dienen später als Grundlage für die gezielte Navigation. Mithilfe des Laserscanners können bei der Navigation auch neue Hindernisse erkannt und gemieden werden. Betreut und unterstützt wird das Team von den Mitarbeitern Jan Erik Krüger und Lars Erbach.
- Das Team Vision des Fachbereichs Informationstechnik (Lehrende: Dr.-Ing. Tai Fei und Prof. Dr. Jörg Thiem) kümmert sich darum, per Stereo-Kamera die zu bergenden Getränkedosen zu erkennen (Bilderkennung) und ihre relativen Positionen zu bestimmen. Die Getränkedosen stehen dabei stellvertretend beispielsweise für Fässer mit Gefahrenstoffen, die in einem realen Rettungseinsatz geborgen werden müssen. Betreut und unterstützt wird das Team von Mitarbeiter Viktor Müller.
Durch die Integration der Arbeiten der drei Teams entsteht ein Gesamtsystem, das eine unbekannte Umgebung kartografiert und die zu bergenden Objekte erfasst. Diese werden dann gezielt mit dem Greifer auf dem kürzesten Weg aus der Gefahrensituation geborgen und in Sicherheit gebracht. Auch die Lehrenden Prof. Dr. Yan Liu und Prof. Dr. Andreas Becker stehen dabei allen Teams während der Blockwoche mit Ideen und Tipps zur Seite.

Ziel der Blockwoche
Durch die Teilnahme an der Blockwoche sollen die Studierenden erlernen und erfahren, wie interdisziplinäres Arbeiten an einer komplexen Aufgabe funktioniert. Dabei geht es zum Beispiel um die Selbstorganisation im eigenen Team zur Bearbeitung des eigenen Teilprojekts. Auch die Kommunikation und abschließende Integration mit den anderen Teams ist ein wichtiger Aspekt. In der Praxis sind rein homogene Teams eher selten, sodass ein fachübergreifender Austausch wichtig ist, um das anvisierte Ziel zu erreichen. Im gewählten Szenario ist dies unabdingbar. Schon allein der enge Zeitrahmen von nur fünf Tagen erlaubt es keiner Einzelperson, sich mit allen Aspekten zu beschäftigen.
Die Blockwoche der Robotik-AG schlägt somit die Brücke zwischen den Master-Studierenden der beteiligten Fachbereiche. Sie ermöglicht nicht nur die Arbeit im eigenen Fachbereich, sondern macht es auch erforderlich, am Ende der Woche eine integrierte Lösung zu schaffen.
Ablauf der Blockwoche
Nach einer gemeinsamen Kick-off-Veranstaltung am Montagmorgen im Besprechungsraum des IDiAL teilen sich die Studierenden in drei Teams auf. Diese arbeiteten dabei nach agilen Projektmanagement-Prinzipien wie Scrum selbständig. Jedes Team wählt eine*n Team-Sprecher*in, die jeweils für die tägliche Synchronisierung der Teams untereinander verantwortlich sind. Ein Zusammentreffen aller Studierenden ist für den Freitag als letzten Tag der Blockwoche geplant. Zur Integration werden nach einer täglichen Besprechung (Daily) der einzelnen Teams und dem Austausch der Team-Sprecher*innen untereinander wieder die Räume des IDiAL von allen Teams genutzt. Das Ziel: Eine abschließende praktische Vorführung, um die Blockwoche abzuschließen. Im Nachgang sollen die jeweiligen Ergebnisse der einzelnen Teams in den Lehrveranstaltungen der Fachbereiche festgehalten und dokumentiert werden.
Erster Tag
Los geht es in den Räumen des User-Innovation-Centers (UIC) mit einem Kurzvortrag zur Nutzung des Robot-Operating-Systems (ROS) als gemeinsamer Kommunikationsschnittstelle.

Die Sichtung des bereitgestellten Materials, die Erfassung von nutzbaren Software-Bibliotheken und ROS-Paketen prägen den ersten Tag der Blockwoche. So beschäftigt sich das Team Greifer mit einigen vorhandenen Greiferkonzepten und kann grundlegende Ideen austauschen. Das Team Navigation nutzt die Chance, erste Datensätze mit dem Laserscanner des EduRobs zu erfassen, um herauszufinden, wie gut Hindernisse und Wände erkannt werden.

Anschließend geht es für das Team Greifer in die Labore des Fachbereichs Maschinenbau in den Gebäuden am Standort Sonnenstraße. Das Team Vision nutzt den Besprechungsraum des IDiAL sowie ein kleines Büro. Das Team Navigation kann den Studierendenraum im Untergeschoss des IDiAL für sich reservieren und für erste Tests kurzfristig auch das Roboterlabor (ebenfalls im Untergeschoss des IDiAL) für sich entdecken.

Zweiter Tag
Nachdem das grundsätzliche Vorgehen besprochen ist, stürzen sich die Teams auf erste Versuche, um konkrete Ansätze anzugehen.
Dabei wird im Team Navigation der Antrieb des EduRobs kalibriert, um die Koppelnavigation (Odometrie) zu verbessern und die Algorithmen zur gleichzeitigen Lokalisierung des Roboters und der Erstellung der Karte zu unterstützen (englisch: Simultaneous Localization and Mapping, kurz SLAM). So lassen sich verschiedene ROS-Module zur Implementierung von SLAM-Verfahren testen. Hierfür wird die im Roboterlabor aufgebaute Umgebung mehrmals umgestaltet. Besonders im Teil der Exploration der unbekannten Umgebung unterscheiden sich die getesteten Verfahren und erfordern eine Anpassung der Parameter, um die Erreichbarkeit von neuen Kartenteilen beurteilen zu können.
Im Team Vision werden Kamerabilder mit beiden Kameras der Stereo-Kamera erfasst. Die Erkennung und Klassifikation von Objekten (den Getränkedosen) steht dabei zunächst im Vordergrund. Aber auch das Zusammenführen beider Kamerabilder für eine Tiefeninformation ist ein Arbeitspaket, das bereits begonnen wird.
Dritter Tag
Beim globalen Abstimmungsmeeting der Sprecher*innen der Teams geht es am dritten Tag unter anderem auch um die Abstimmung von wichtigen Parametern wie den Dimensionen des Greifers – wertvolle Informationen sowohl für die Navigation, zur Bestimmung von befahrbaren Korridoren in der Karte, als auch für die Erkennung der Objekte durch das Team Vision in Hinblick auf die Distanz zu den Objekten vor dem Greifen.

Die elektrische und informationstechnische Schnittstelle zwischen dem Team Greifer und dem Team Navigation wird erarbeitet und anhand eines im Vorfeld vorhandenen Greifers getestet. Da der endgültige Greifer den gleichen Motor verwendet, konnte auf diesem Weg bereits vorgearbeitet werden, was die Integration am letzten Tag beschleunigen soll.

Auch das Team Vision nutzt die vom Team Navigation aufgebaute Umgebung für Tests im realen Umfeld. Dafür wird ein EduRob mit der Stereo-Kamera ausgestattet und zusammen mit Objekten im Szenario platziert. Durch die Netzwerk-Infrastruktur des IDiAL ist der Zugriff aus dem Besprechungsraum im 1. Obergeschoss auf das Netzwerk des Roboterlabors im Untergeschoss möglich.

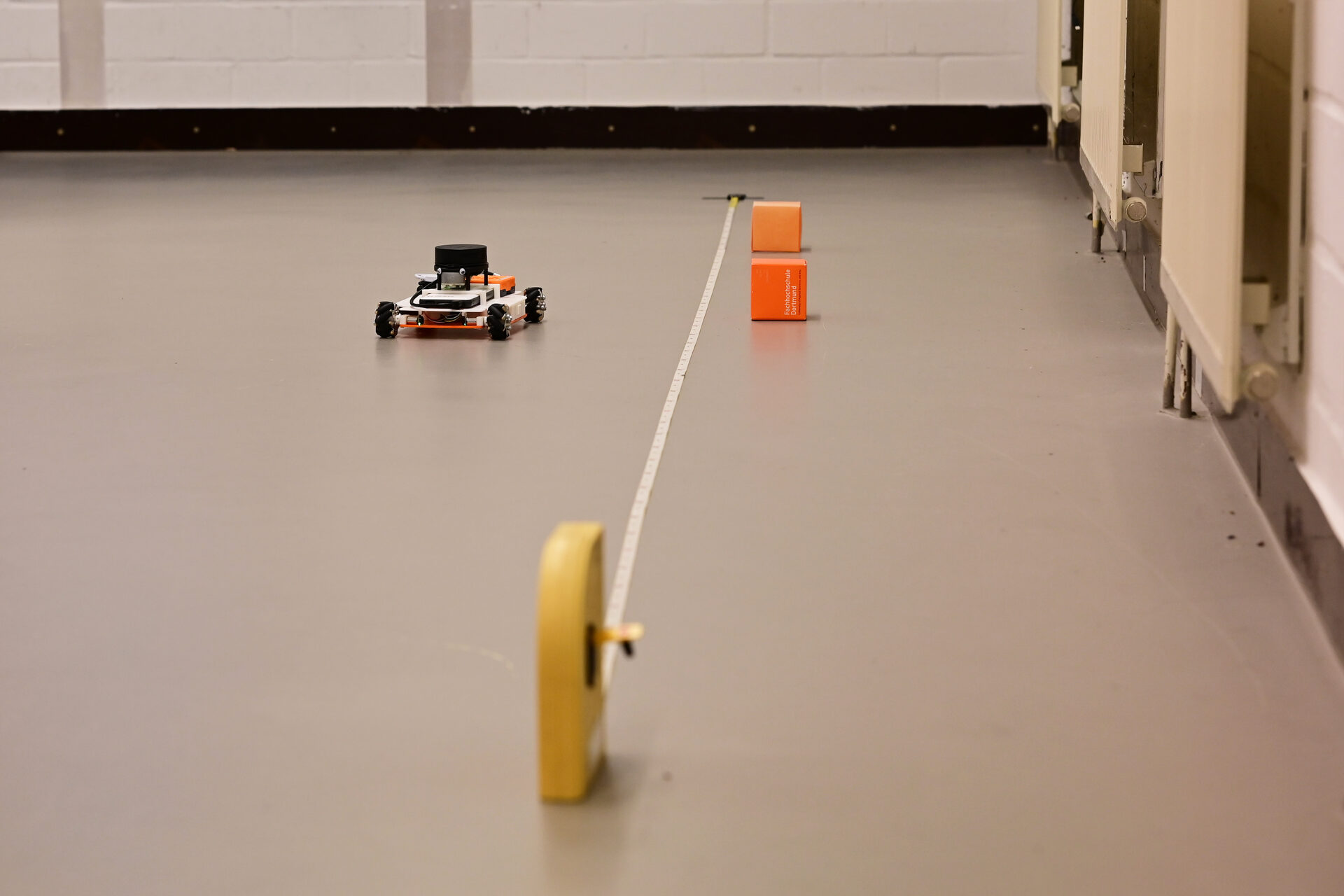
Im Team Navigation werden auftauchende Fehler bei der Ansteuerung des Antriebs analysiert und bewältigt. Hierfür wird vom Team im Roboterlabor eine mit einem Maßband ausgemessene Fahrstrecke eingerichtet. An ihr entlang kann der EduRob wiederholt Streckenabschnitte abfahren, die durch kleine FH-Würfel gekennzeichnet sind. So ist es möglich, die verbesserte Kalibrierung des Antriebs zu kontrollieren und nachzuverfolgen. Das Erfassen von gefahrenen Distanzen durch den Antrieb dient der Optimierung der Lokalisierungs- und Navigationsalgorithmen, die so, neben den Laserscannern, eine zweite Datenquelle bekommen.
So können alle Teams am dritten Tag gute Fortschritte erzielen und Pläne für den letzten vollen Arbeitstag vor der anstehenden Integration schmieden.
Vorletzter Tag
Die drei Teams nutzen den vierten Tag der Blockwoche vor allem zur Verfeinerung der gewählten Ansätze.
Das Team Navigation ergänzt die Umgebung mit Objekten, um die Erkennung von Dosen in den vom Laserscanner gelieferten Daten zu testen. Hierdurch wird eine Ergänzung der vom Team Vision gewonnenen Klassifikationsdaten um Koordinaten möglich.
Im Team Vision wurden die Szenarien um sogenannte ArUco-Marker erweitert, die sich als bekannte Referenzelemente zur besseren Bewertung der gewonnenen Kamerabilder nutzen lassen.
Das Team Greifer kann den ersten Greifer-Prototypen fertigen lassen (Rapid Prototyping). Die 3D-Dateien, die zuvor mit dem CAD-System erstellt wurden, werden in einem 3D-Drucker aus dem Werkstoff PLA (Polylactide) und die Greifer-Finger aus dem elastischen Werkstoff TPU (thermoplastischem Polyurethan) hergestellt (per additiver Fertigung).
Tag der Integration und Präsentation
Zum Abschluss der Blockwoche treffen sich alle Teams ein letztes Mal zur ihren internen Dailys. Ziel ist es sich, auf die bevorstehende finale Integration mit den anderen Teams vorzubereiten. Ebenfalls im letzten Meeting der Sprecher*innen der Teams wird der Zeitpunkt der Präsentation auf 16 Uhr mit einem Probelauf um 15 Uhr festgelegt.

Das Team Greifer kann zur Fertigung der letzten Teile des Greifers den 3D-Drucker der Werkstatt des IDiAL verwenden, die finale Version des Greifers vor Ort zusammenbauen und ihn schließlich den anderen Teams präsentieren.

In mehreren Testläufen wird daraufhin der praktische Teil der Abschlusspräsentation geprobt, letzte Änderungen erfolgen.
Um 16 Uhr startet die hybride Präsentation. Während sich die Mehrheit der Teilnehmenden der Blockwoche im Roboterlabor eingefunden haben, werden per Online-Meeting weitere Beteiligte zugeschaltet. Zunächst präsentiert das Team Navigation die Erkundung der unbekannten Umgebung und die Erstellung der Karte. Im zweiten Schritt werden die zu erfassenden und zu bergenden Objekte in Form der Getränkedosen hinzugefügt. Sie lassen sich erfolgreich lokalisieren und greifen.

Die Teams Vision und Greifer gehen abschließend in Detailpräsentationen genauer auf die gewählten Ansätze mit deren Stärken und Schwächen ein.
Zur Robotik-AG
Die Robotik-AG ist eine fachbereichsübergreifende Arbeitsgemeinschaft an der Fachhochschule Dortmund, die sich interdisziplinär mit allen Aspekten der Robotik in Forschung und Lehre befasst. Die einzelnen Fachbereiche steuern dabei ihre besonderen Stärken und Fähigkeiten bei. Regelmäßig veranstaltet die Robotik-AG die Robotik-Blockwoche in den Räumen des IDiAL. Außerdem findet das Robotics-Forum an der Fachhochschule Dortmund statt, welches 2023 am zweiten Tag der Blockwoche mit dem 8. Robotics-Forum und drei spannenden Vorträgen das Themenfeld Robotik im Detail beleuchtete.
Zum IDiAL
Das IDiAL erforscht als zentrale wissenschaftliche Einrichtung der Fachhochschule Dortmund die Digitale Transformation. An der Otto-Hahn-Straße 23 in Dortmund werden zu diesem Zweck Büros, Labore und eine Werkstatt betrieben. Für die Robotik-Blockwoche 2023 wurden neben einem Besprechungsraum und einem Arbeitsraum für studentische Arbeiten auch Räume des User-Innovation-Centers (UIC), das Roboterlabor des IDiAL und die Werkstatt des Instituts genutzt.
Neben der jährlichen Blockwoche wird am IDiAL in mehreren Projekten mit Bezug zur Robotik geforscht. Als Teil dieser Forschungsprojekte bearbeiten Studierende auch Abschlussarbeiten in den Bachelor- und Master-Studiengängen des Fachbereichs Informatik.
Beteiligte Lehrveranstaltungen
- Das Team Navigation bestand aus 8 Studierenden des Fachbereichs Informatik, die im Rahmen des Master-Moduls „Autonome mobile Systeme“ in der Blockwoche die erarbeiteten Modulinhalte in die Praxis umsetzten konnten.
- Das Team Greifer bestand aus 9 Studierenden des Fachbereichs Maschinenbau, die im Rahmen des Master-Moduls „Robotik und Handhabungstechnik“ an der Blockwoche teilgenommen haben. Unterstützt wurde das Team Greifer von einer studentischen Hilfskraft aus dem Fachbereich Elektrotechnik.
- Das Team Vision bestand aus 9 Studierenden des Fachbereichs Informationstechnik, die im Rahmen des Master-Moduls „Advanced Robotic Vision“ an der Blockwoche teilgenommen haben.
Ansprechpartner





Prof. Thomas Straßmann, Dr.
- 0231 91129334
nach Vereinbarung per Email