Über das Projekt
Der demographische Wandel führt auch zu einer veränderten Altersstruktur in der erwerbstätigen Bevölkerung in Deutschland. Der Anteil älterer Arbeitnehmer*innen steigt, ohne dass die physischen Belastungen am Arbeitsplatz abnehmen. Mit zunehmendem Alter sinkt in der Regel die körperliche Leistungsfähigkeit, was eine neue Arbeitsorganisation und neue Formen des Robotereinsatzes erforderlich macht.
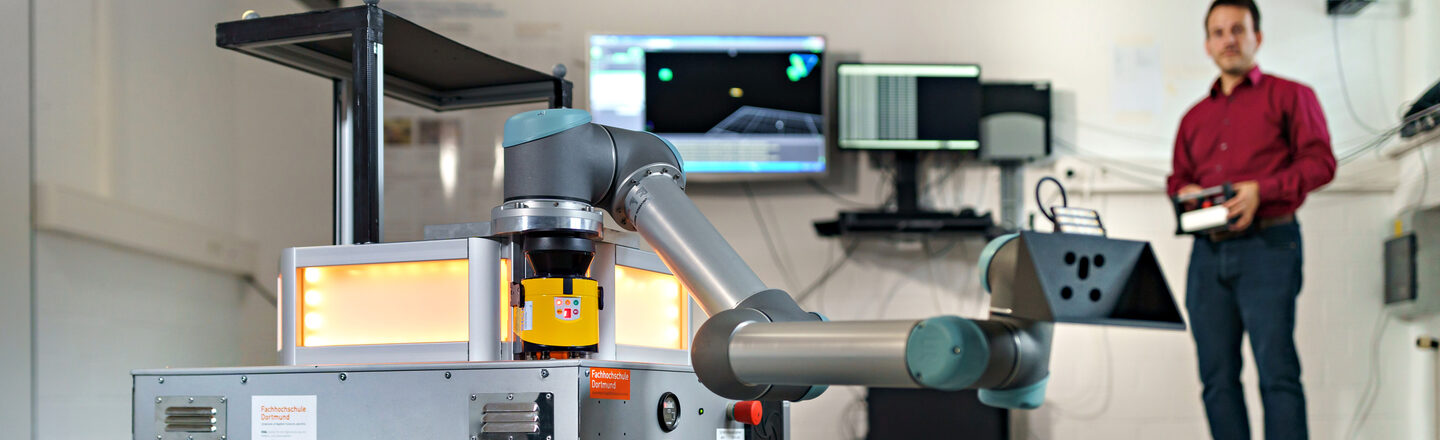
Ziel des Forschungsprojektes ist es, Menschen in körperlich beanspruchenden Arbeitsprozessen durch eine individuelle Mensch-Roboter-Kooperation zu entlasten. Bei der Mensch-Roboter-Kooperation arbeiten Menschen direkt mit Robotern ohne trennende Schutzzäune zusammen. Ziel ist eine optimale Aufgabenteilung zwischen Mensch und Roboter, wobei der Mensch seine Erfahrungen sowie seine dem Roboter überlegenen sensorischen und sensomotorischen Fähigkeiten einsetzen, der Roboter wiederum ohne Ermüdung körperlich schwere Tätigkeiten mit hoher Wiederholgenauigkeit übernehmen kann. Zwei Anwendungsfelder wurden in der Forschung bisher wenig berücksichtigt: Im produzierenden Gewerbe ist neben der Montage die Intralogistik und insbesondere die Kommissionierung durch manuelle und körperlich stark beanspruchende Tätigkeit geprägt. Bei der Kommissionierung als eine der zentralen Funktionen der Intralogistik müssen Teile aus einem Sortiment mit einer hohen Varianz in Größe, Form und Gewicht und meist kurzen Vorlaufzeiten zu Kundenaufträgen zusammengestellt werden. Ein zweites Anwendungsgebiet ist die zivile Sicherheit und dort insbesondere die Arbeit der Feuerwehr. Die Arbeit der Feuerwehr ist durch starke körperliche Beanspruchung geprägt. Sie bietet damit ein hohes Potenzial für eine Mensch-Roboter-Kooperation. Zusammen mit vier Projektpartnern werden für beide Anwendungsfelder konkrete Einsatzszenarien und konkrete Lösungskonzepte entwickelt.
Bei der Entwicklung der Lösungskonzepte sollen insbesondere individuelle körperliche Einschränkungen berücksichtigt werden. Der Roboter soll sich im Idealfall an die individuellen Einschränkungen anpassen. Für das Anwendungsgebiet Intralogistik soll zudem für ein exemplarisches Einsatzszenario ein Assistenzroboter als Demonstrator entwickelt und in einer industriellen Umgebung getestet werden. Bei der Gestaltung der Mensch-Roboter-Schnittstelle soll nicht nur die Fähigkeit des Roboters zur Beherrschung des Produktionsprozesses betrachtet werden, sondern es soll auch die Beeinflussung der Arbeitsbedingungen des Menschen berücksichtigt werden.
Das Forschungsprojekt wird inter- und transdisziplinär mit Partnern aus Wissenschaft und Praxis bearbeitet:
Fraunhofer Institut für Materialfluss und Logistik (IML): Identifikation von Anwendungsszenarien sowie Definition der Anforderungen für die Mensch-Roboter-Kooperation im Bereich Intralogistik und Kommissionierung
Institut für Feuerwehr- und Rettungstechnologie der Stadt Dortmund (IFR): Identifikation von Anwendungsszenarien sowie Definition der Anforderungen für die Mensch-Roboter-Kooperation im Bereich der Feuerwehr und der zivilen Sicherheit
Forschungsinstitut für Technologie und Behinderung (FTB) der evangelischen Stiftung Volmarstein: Anforderungsentwicklung aus Sicht der Menschen, Kompetenz in der Entwicklung und Bewertung von Technischen Unterstützungssysteme für Menschen mit körperliche Einschränkungen
J.D. Theile GmbH & Co. KG (JDT) Schwerte: Sowohl als Entwickler von Robotersystemen (JDT robotics) als auch als potentieller Anwender der entwickelten Mensch-Roboter-Kooperation in der Intralogistik der Kettenfertigung.
Fördergeber
Förderkennzeichen
005-1703-0008
Förderprogramm / Forschungsprogramm
FH ZEIT FÜR FORSCHUNG
Kooperations-/Projektpartner
- Fraunhofer Institut für Materialfluss und Logistik (IML)
- Institut für Feuerwehr- und Rettungstechnologie der Stadt Dortmund (IFR)
- Forschungsinstitut für Technologie und Behinderung (FTB) der evangelischen Stiftung Volmarstein
- J.D. Theile GmbH & Co. KG (JDT) Schwerte

Publikationen
Röhrig, C. & Heß, D. (2020), "Mobile Manipulation for Human-Robot Collaboration in Intralogistics", In IAENG Transactions on Engineering Sciences - Special Issue for the International Association of Engineers Conferences 2019. , S. 1-20. World Scientific.
Röhrig, C. & Heß, D. (2019), "OmniMan: A Mobile Assistive Robot for Intralogistics Applications", Engineering Letters., December, 2019. Vol. 27(4), S. 893-900.
Röhrig, C. & Heß, D. (2019), "OmniMan: An Omnidirectional Mobile Manipulator for Human-Robot Collaboration", In Proceedings of the International MultiConference of Engineers and Computer Scientists 2019 (IMECS 2019). Hong Kong. March 2019., S. 55-60.

