About the project
The demographic change is causing an altered age structure in the working population of Germany. The proportion of older working people is rising without any reduction in physical strain at the workplace. With increasing age physical fitness is normally reduced and this necessitates new work organisation and new forms of robot usage.
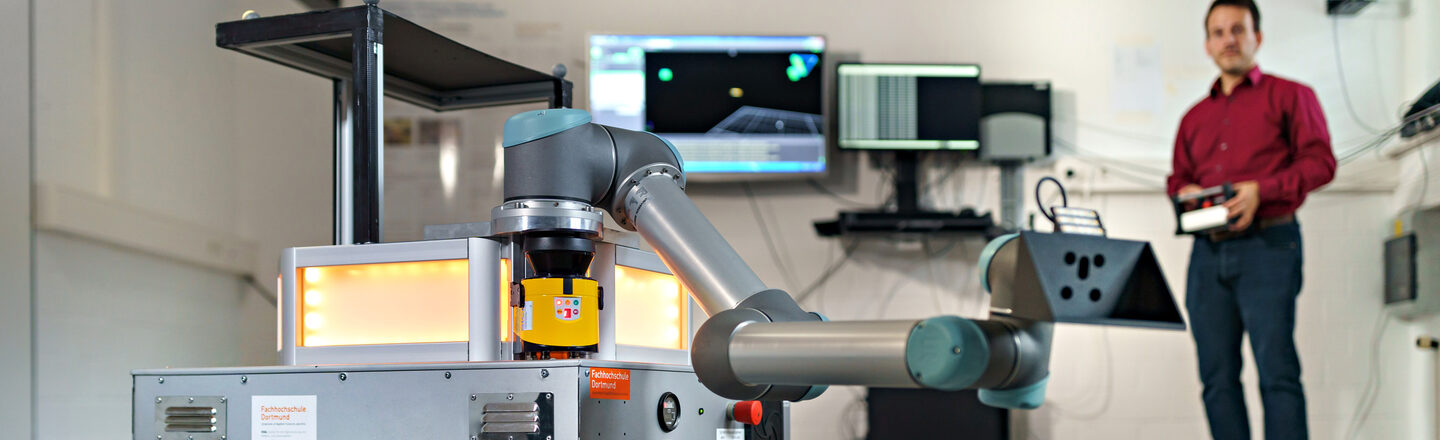
The aim of this research project is to reduce the load on humans in physically demanding work processes without individual human robot cooperation. During human robot cooperation humans work directly with robots with out any safety fencing. The aim is an optimal work split between human and robot, where the human can use their experience as well as their superior sensory and sensorimotor abilities, while the robot can take on physically heavy tasks with high repetitive accuracy without tiring. Two fields of application have so far been neglected by research: In manufacturing assembly, intralogistics and especially order picking are manual and physically very challenging tasks. During order picking, a central function of intralogistics, parts from a large range with great variety of size, shape and weight need to be collected for often short notice customer orders. A second field of application is civil safety and here especially the work of the fire service. The work of the fire service is characterised by heavy physical demands. It therefore offers great potential for human robot cooperation. Jointly with four project partners specific application scenarios and specific solution concepts are being developed for both fields of application. Individual physical limitations particularly are being taken into account during the development of solution concepts. Ideally the robot will adapt to the individual limitations. For intralogistics an assistant robot as a demonstrator will additionally be developed for an example application scenario and tested in an industrial environment.
In the design of the human robot interface not only the proficiency of the robot for the production process will be considered, but also the impact of the working conditions of the human will be taken into account.
The research project is being carried out with inter- and transdisciplinary partners from science and praxis:
Fraunhofer Institute for Material Flow and Logistics (IML): Identification of application scenarios and definition of requirements for human robot cooperation in the area intralogistics and order picking
Institute for Fire and Rescue Technology of the City of Dortmund (IFR): Identification of application scenarios and definition of requirements for human robot cooperation in the area fire service and civil safety
Research Institute for Technology and Disability (FTB) of the evangelical foundation Volmarstein: Development of requirements from the human perspective, expertise in development and evaluation of technical support systems for people with physical limitations
J.D. Theile GmbH and Co KG (JDT) Schwerte: Both as developer of robot systems (JDT robotics) and as potential user of the devised human robot cooperation in the intralogistics of chain production
Funded by
Funding-ID
005-1703-0008
Funding program / research program
FH ZEIT FÜR FORSCHUNG
Cooperation / project partners
- Fraunhofer Institut für Materialfluss und Logistik (IML)
- Institut für Feuerwehr- und Rettungstechnologie der Stadt Dortmund (IFR)
- Forschungsinstitut für Technologie und Behinderung (FTB) der evangelischen Stiftung Volmarstein
- J.D. Theile GmbH & Co. KG (JDT) Schwerte

Publications
Röhrig, C. & Heß, D. (2020), "Mobile Manipulation for Human-Robot Collaboration in Intralogistics", In IAENG Transactions on Engineering Sciences - Special Issue for the International Association of Engineers Conferences 2019. , S. 1-20. World Scientific.
Röhrig, C. & Heß, D. (2019), "OmniMan: A Mobile Assistive Robot for Intralogistics Applications", Engineering Letters., December, 2019. Vol. 27(4), S. 893-900.
Röhrig, C. & Heß, D. (2019), "OmniMan: An Omnidirectional Mobile Manipulator for Human-Robot Collaboration", In Proceedings of the International MultiConference of Engineers and Computer Scientists 2019 (IMECS 2019). Hong Kong. March 2019., S. 55-60.


