Profile
The Robotics Lab is a place for evaluation and implementation of robotics related projects inside IDiAL. Through its outstanding equipment and being located right next to the workshop the robotics lab is an optimal incubator for all robotics prototypes. Featuring a large scale test area it isespecially suitable for evaluating and testing prototypes of mobile robots. Through the main focus of the lab lies in the development and evaluation of algorithms for localization and navigation of mobile robots. By using the installed motion tracking system, the algorithm can not only be tested but also validated through highly accurate reference measurements. There is also a wide variety of mobile robots located at the lab featuring all sorts of drives ranging from omnidirectional Mecanum drives to classical differential drives. This existing robots do allow for a more
software focused use of the lab providing optimal conditions for accommodating lectures and students working on their robotics related thesis topics.
Equipment
Work stations
There are three work stations at the head side of the room. Two out of this three work stations are to be used with notebooks.
An additional work station is equipped with a hard wired Linux PC and can be used standing and sitting. There is also an powerful PC connected to a large screen TV for visualization of e.g. the data provided by the motion tracking system installed through the lab.

Motion Tracking
A Vicon motion tracking system is installed. Utilizing four cameras installed at the four corners of the lab most parts of the test area is covered. Using reflektive markers the system provides 3D motion tracking of marked objects.

Collection of a variety mobile robots and mobile manipulators
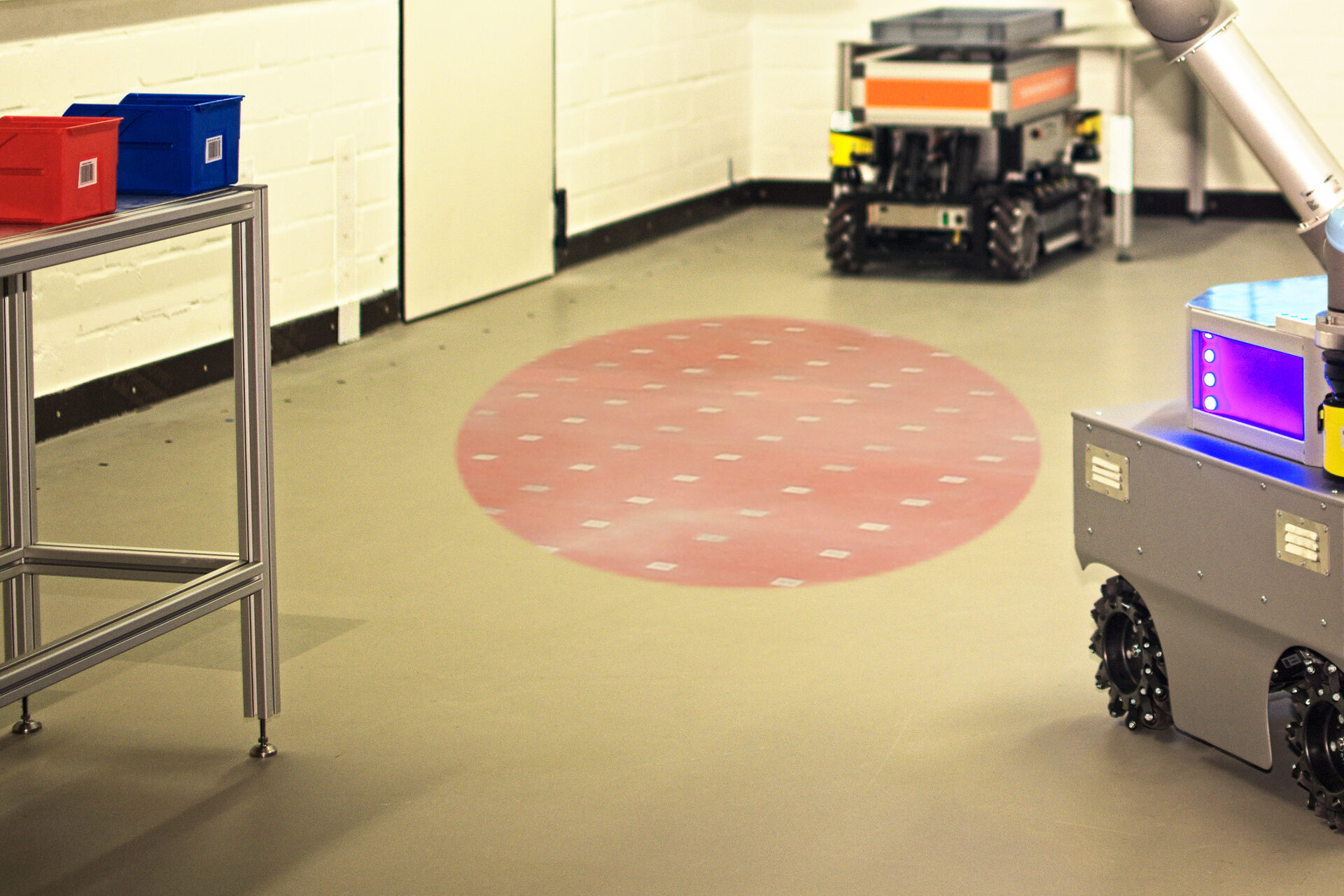
A variety of mobile robots and mobile manipulators are always available on side. Beside classic educative robots like the Pioneer series, equipped with and without grippers, there are also Mecanum based mobile robots in different sizes and shapes to be found at the lab. The star of the collection is OmniMan a Omnidirectional mobile Manipulator. OmniMan combines an omnidirectional Mecanum based drive unit (all three degrees of freedom on the plain) with an Universal Robots UR5 robot arm (six degrees of freedom) to a flexible system. OmniMan can make use of the installed safety lase range finders covering the whole 360° around the platform. Additionally the RFID reader installed underneath the robot can read the RFID tags installed into the floor of the lab. Additionally there are different robotic vacuum cleaners with programming interfaces and some more omnidirectinal robots in different sizes.

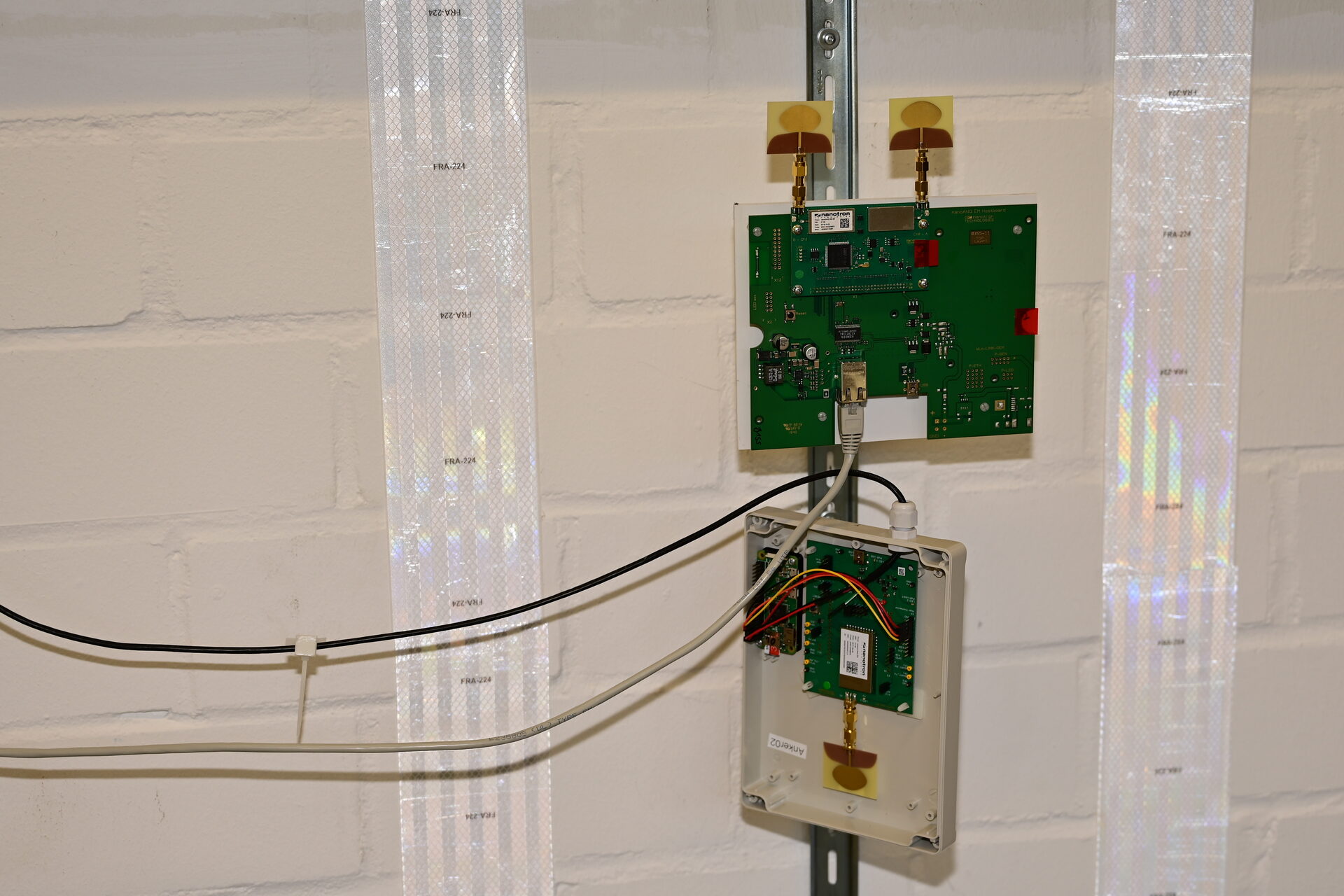
Passive and active landmarks for localization
At some key points the lab features passive as well as active land marks to be used for localization. The passive reflex tape land marks can be used together with the laser range finders and active Ultra Wide Band (UWB) tags are to be used with matching USB connected modules.
Flat surface floor with RFID tags: NaviFloor®
The floor of the lab consists of a flat and even surface with embedded RFID tags. With 831 tags installed in a grid with 12.5 cm spacing mobile robots can use RFID readers to estimate their position inside the lab.